
¿Te ha llamado la atención el título? ¡Perfecto! Porque en este tutorial vamos a hacer precisamente eso: convertir una mesa regulable de Flexispot en una mesa inteligente, capaz de gestionar automatizaciones de manera eficiente. Prepárate para transformar tu espacio de trabajo en algo mucho más avanzado y funcional.
Mi mesa: Flexispot E1
Desde hace algún tiempo, utilizo una mesa regulable por motor como mi estación de trabajo, tanto para mis tareas personales como para trabajar en remoto. Debo decir que ha sido una inversión que realmente vale la pena. Pasar hasta 8 horas sentado puede resultar agotador para la espalda, y poder alternar entre estar sentado y de pie es un gran alivio.
Mi mesa incluye un controlador (Modelo HCB213A-1) que permite ajustar la altura fácilmente, además de contar con cuatro memorias para guardar diferentes posiciones preestablecidas. También tiene una pantalla LED que muestra la altura en centímetros, lo cual es muy práctico.
Cuando adquirí la mesa, noté que en la parte trasera, además de los conectores para el motor y la corriente, había un conector RJ45.
Sospecho que este conector tiene un propósito básico, ya sea para conectar algún dispositivo adicional, como un módulo Bluetooth para control remoto, o simplemente para facilitar la instalación y actualización del firmware en fábrica, un conector que quizás no retiraron tras el ensamblaje.
Aquí es donde entra en juego la creatividad de la comunidad. Aprovechando este conector, he implementado un proyecto increíble en mi mesa, y te voy a explicar cómo puedes hacerlo también, ya sea que tengas este modelo o uno superior.
Materiales para el montaje
A continuación, os dejo un listado de todo el material necesario para implementar este proyecto:
- ESP32 8266 (también conocido como D1 Mini Pro)
- Cable de red (de cualquier categoria)
- Cables dupon
- Funda termoretractil para los cables
Herramientas necesarias
- Soldador y estaño
- Conector RJ45
- Grimpadora para RJ45
Esquema para el controlador HCB213A-1
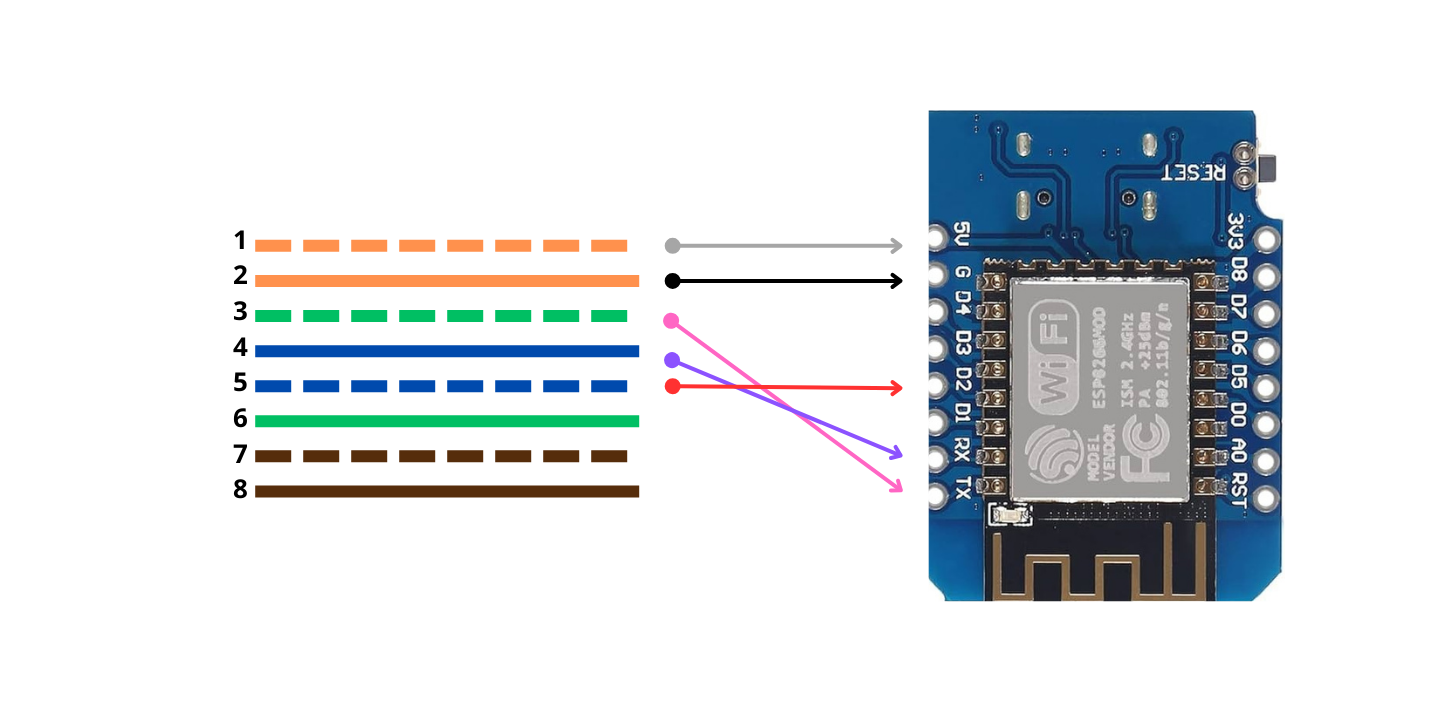
Básicamente tenemos que hacer las siguientes conexiones y soldar los siguientes cables de red con cables dupon:
| Num Cable | Col Cable | Con ESP32 |
|---|---|---|
| 1 | Blanco/Naranja | VIN (5V) |
| 2 | Naranja | GND |
| 3 | Blanco/Verde | TX |
| 4 | Azul | RX |
| 5 | Blanco/Azul | D2 |
| 6 | Verde | |
| 7 | Blanco/Marrón | |
| 8 | Marron |
Explicación del montaje
Lo primero tendremos que montar un cable de red por un extremo del cable, utilizaremos el código de colores conocido como T-568B y que se puede ver a continuación.

Cuando tengamos montado un pin RJ45 por un lado del cable, por el otro lado tendremos que soldar los cables correspondientes a los conectores dupon. Podemos utilizar luego fundas termoretractil individuales para cada conexión que hagamos y luego una para unirlas todas.
Para el modelo de controlador de Flexispot que tengo, he encontrado información en este Issue del proyecto.
Si tenéis otro controlador, podéis ver toda la información en el siguiente enlace:
 iMicknl
iMicknlPreparar ESP32 en Home Assistant
Como ya hemos visto en otro tutorial, primero deberéis de configurar e instalar el firmware de ESP32 en la D1 Mini Pro, para ello deberéis de seguir este otro tutorial.

Una vez tengamos todo preparado, para el controlador de la mesa HCB213A-1 he utilizado esta configuración:
El artículo tiene unos meses ya y han ido actualizado la versión del yaml para adaptarlo a las nuevas actualizaciones de ESPHome. Si tenéis alguna duda sobre que configuración usar, ahora han habilitado un fichero en el repositorio oficial del proyecto.
substitutions:
device_name: Flexispot E1
name: flexispot-e11
min_height: "71" # cm
max_height: "121" # cm
tx_pin: GPIO17 # TXD 2
rx_pin: GPIO16 # RXD 2
screen_pin: GPIO23
encryption_key: "XXXXX"
external_components:
source: github://iMicknl/LoctekMotion_IoT
components: [ loctekmotion_desk_height ]
esp8266:
board: esp01_1m1
esphome:
name: ${name}
friendly_name: ${device_name}
comment: Used to control your ${device_name} standing desk via Home Assistant.
# Wake Desk by sending the "M" command
# This will pull the current height after boot
on_boot:
priority: -10
then:
- button.press: button_m
# Enable logging
logger:
baud_rate: 0
# Enable Home Assistant API
api:
encryption:
key: "XXXXXX"
ota:
platform: esphome
password: "XXXXX"
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
captive_portal:
uart:
- id: desk_uart
baud_rate: 9600
tx_pin: ${tx_pin}
rx_pin: ${rx_pin}
# debug:
sensor:
- platform: wifi_signal
name: "WiFi Signal"
update_interval: 60s
- platform: uptime
name: Uptime
- platform: loctekmotion_desk_height
id: "desk_height"
name: Desk Height
on_value_range:
- below: ${min_height}
then:
- switch.turn_off: switch_down
- above: ${max_height}
then:
- switch.turn_off: switch_up
on_value:
then:
- cover.template.publish:
id: desk_cover
position: !lambda |-
// The sensor outputs values from min_height (cm) to max_height (cm)
// We need to translate this to 0 - 1 scale.
float position = (float(x) - float(${min_height})) / (float(${max_height}) - float(${min_height}));
return position;
- component.update: set_desk_height
switch:
- platform: gpio
name: "Virtual Screen" # PIN20
pin:
number: ${screen_pin}
mode: OUTPUT
restore_mode: ALWAYS_ON
entity_category: "config"
internal: true
- platform: uart
name: "Up"
id: switch_up
icon: mdi:arrow-up-bold
data: [0x9b, 0x06, 0x02, 0x01, 0x00, 0xfc, 0xa0, 0x9d]
uart_id: desk_uart
send_every: 108ms
internal: true
- platform: uart
name: "Down"
id: switch_down
icon: mdi:arrow-down-bold
data: [0x9b, 0x06, 0x02, 0x02, 0x00, 0x0c, 0xa0, 0x9d]
uart_id: desk_uart
send_every: 108ms
internal: true
- platform: uart
name: "Alarm off"
id: switch_alarm
icon: mdi:alarm
data: [0x9b, 0x06, 0x02, 0x40, 0x00, 0xAC, 0x90, 0x9d]
uart_id: desk_uart
send_every: 108ms
on_turn_on:
- delay: 3000ms
- switch.turn_off: switch_alarm
entity_category: "config"
- platform: uart
name: "Child Lock"
id: switch_child_lock
icon: mdi:account-lock
data: [0x9b, 0x06, 0x02, 0x20, 0x00, 0xac, 0xb8, 0x9d]
uart_id: desk_uart
send_every: 108ms
on_turn_on:
- delay: 5000ms
- switch.turn_off: switch_child_lock
entity_category: "config"
button:
- platform: template
name: "Preset 1"
icon: mdi:numeric-1-box
on_press:
- uart.write:
id: desk_uart
data: [0x9b, 0x06, 0x02, 0x04, 0x00, 0xac, 0xa3, 0x9d]
- platform: template
name: "Preset 2"
icon: mdi:numeric-2-box
on_press:
- uart.write:
id: desk_uart
data: [0x9b, 0x06, 0x02, 0x08, 0x00, 0xac, 0xa6, 0x9d]
- platform: template
name: "Sit" # Preset 3 on some control panels
icon: mdi:chair-rolling
on_press:
- uart.write:
id: desk_uart
data: [0x9b, 0x06, 0x02, 0x00, 0x01, 0xac, 0x60, 0x9d]
- platform: template
name: "Stand" # Preset 4 on some control panels
icon: mdi:human-handsup
on_press:
- uart.write:
id: desk_uart
data: [0x9b, 0x06, 0x02, 0x10, 0x00, 0xac, 0xac, 0x9d]
- platform: template
name: "Memory"
id: button_m
icon: mdi:alpha-m-box
entity_category: "config"
on_press:
- uart.write:
id: desk_uart
data: [0x9b, 0x06, 0x02, 0x20, 0x00, 0xac, 0xb8, 0x9d]
- platform: template
name: "Wake Screen"
id: button_wake_screen
icon: mdi:gesture-tap-button
entity_category: "config"
on_press:
- uart.write:
id: desk_uart
data: [0x9b, 0x06, 0x02, 0x00, 0x00, 0x6c, 0xa1, 0x9d]
- platform: template
name: "Alarm"
id: button_alarm
icon: mdi:alarm
on_press:
- uart.write:
id: desk_uart
data: [0x9b, 0x06, 0x02, 0x40, 0x00, 0xAC, 0x90, 0x9d]
- platform: restart
name: "Restart"
entity_category: "config"
cover:
- platform: template
id: "desk_cover"
icon: mdi:desk # or mdi:human-male-height-variant
name: "Desk"
device_class: blind # makes it easier to integrate with Google/Alexa
has_position: true
position_action:
- if:
condition:
- lambda: !lambda |-
return pos > id(desk_cover).position;
then:
- cover.open: desk_cover
- wait_until:
lambda: |-
return id(desk_cover).position >= pos;
- cover.stop: desk_cover
else:
- cover.close: desk_cover
- wait_until:
lambda: |-
return id(desk_cover).position <= pos;
- cover.stop: desk_cover
stop_action:
- switch.turn_off: switch_up
- switch.turn_off: switch_down
open_action:
- switch.turn_off: switch_down
- switch.turn_on: switch_up
close_action:
- switch.turn_off: switch_up
- switch.turn_on: switch_down
optimistic: false
number:
- platform: template
name: "Desk Height"
id: set_desk_height
min_value: ${min_height}
max_value: ${max_height}
icon: "mdi:counter"
unit_of_measurement: "cm"
device_class: "distance"
step: 0.1
lambda: !lambda |-
return id(desk_height).state;
set_action:
- if:
condition:
- lambda: !lambda |-
return x > id(desk_height).state;
then:
- cover.open: desk_cover
- wait_until:
lambda: |-
return id(desk_height).state >= x;
- cover.stop: desk_cover
else:
- cover.close: desk_cover
- wait_until:
lambda: |-
return id(desk_height).state <= x;
- cover.stop: desk_cover
En el repositorio de Github se encuentra un fichero llamado desk_height_sensor.h que sirve para saber la altura de la mesa, y es necesario que sea copiado dentro del directorio config/esphome de tu Home Assistant.
iMicknlUna vez instaléis la configuración del dispositivo, deberíais de tener acceso remoto desde Home Assistant.

Ideas de automatizaciones
A continuación os dejo algunas ideas para crear automatizaciones con nuestra mesa inteligente que hemos creado.
Una que me gusta mucho y que uso a diario, normalmente cuando trabajo en remoto, me gusta atender llamadas y videollamadas de pié, así noto el cansando y no me lio mucho con las llamadas. Así que he creado una automatización que a una hora concreta se eleva le mesa. Esto es útil si por ejemplo haces un daily en equipo siempre a la misma hora.
Otra automatización que tengo es que cada vez que me pasan una llamada al teléfono, la mesa se eleva si estoy en la habitación. De esta forma, puedo atender al llamada de pie.
Algo interesante, es que puedes configurar la altura de la mesa al principio de tu jornada, por ejemplo si quieres empezar siempre de pie porque aún estás dormido/a/e y quieres despejarte, es una forma interesante para crear una automatización y hacer que se eleve la mesa minutos antes de que llegues a la habitación.
Pero sin duda, la automatización que más utilizo, es una por comando de voz y Assist, el asistente de Home Assistant. Le puedo decir "estoy cansado" y se baja la mesa. También puedo decirle "Me levanto" y se eleva la mesa.






Comentarios